Главная | О сайте | Задачи | Проекты | Результаты | Диверсификация | Новости | Вопросы | История | Информация | Ссылки
Среда, 24.06.2026
Космическая погода на текущий час
Космическая погода на текущий час
Вход в систему не произведен
Войти / Регистрация
Войти / Регистрация
Секция Совета РАН по космосу
< СМИ: администрация Трампа может наполовину сократить бюджет на исследования в NASA
12.03.2025 23:09 Давность: 1 year
Категория: Технологии, Системы планет гигантов, Сатурн
Количество просмотров: 2754
Категория: Технологии, Системы планет гигантов, Сатурн
Количество просмотров: 2754
Одноногий робот поищет признаки жизни в криовулканах Энцелада
Американские инженеры разрабатывают прыгающего робота LEAP (Legged Exploration Across the Plume) для исследования спутника Сатурна Энцелада. Одноногий робот массой около 0,5 килограмма сможет преодолевать большие расстояния прыжками в условиях низкой гравитации и сложного ледяного рельефа. Для ориентации корпуса во время прыжка и передвижения по поверхности будут использоваться колеса-маховики.
Основной задачей аппарата станет сбор образцов из нижней части водяных выбросов криовулканов Энцелада в поисках потенциальных признаков жизни в подледном океане. LEAP может отправиться к луне Сатурна в составе экспедиции Enceladus Orbilander, которая планируется на 2030-е годы. На проект обратило внимание издание IEEE Spectrum.
Энцелад — четырнадцатый по удаленности и шестой по размеру спутник Сатурна диаметром около 500 километров. Он покрыт толстой 40-километровой ледяной корой, под которой находится глобальный водяной океан глубиной несколько десятков километров. О том, что океан существует и находится в жидком состоянии, стало известно после того как межпланетная исследовательская станция «Кассини» обнаружила во время облета спутника гигантские шлейфы, поднимающиеся на высоту в 250 километров из трещин в ледяном покрове на южном полюсе. Особый интерес океан представляет для астробиологов — анализ собранных станцией данных показал, что в выбросах криовулканов присутствуют крупные органические молекулы. Их наличие указывает на гидротермальную активность и потенциальную обитаемость подледного океана Энцелада.
Собранные «Кассини» данные нельзя назвать полными: зонд пролетал только через удаленные от поверхности участки шлейфов, где их состав уже мог измениться под воздействием внешних условий. Поэтому ученым важно изучить материал как можно ближе к источнику выбросов. В этом мог бы помочь исследовательский аппарат, передвигающийся по поверхности. Однако рельеф южного полюса Энцелада очень неровный, поэтому передвижение по нему роверов и шагоходов может быть сильно затруднено. Отсутствие атмосферы делает бесполезными аэродинамические аппараты, а использование реактивных двигателей для перелета с места на место может загрязнить собранные образцы.
В сложившейся ситуации и с учетом низкой гравитации Энцеалада, составляющей всего один процент от земной, наиболее эффективным способом передвижения могли бы стать прыжки. Именно этот принцип и заложен в основу LEAP (Legged Exploration Across the Plume) — прыгающего робота, над которым работают инженеры из Университета Иллинойса и Лаборатории реактивного движения NASA. В основе LEAP лежит концепция миниатюрного прыгающего робота Salto, созданного в 2016 году в Калифорнийском университете в Беркли.
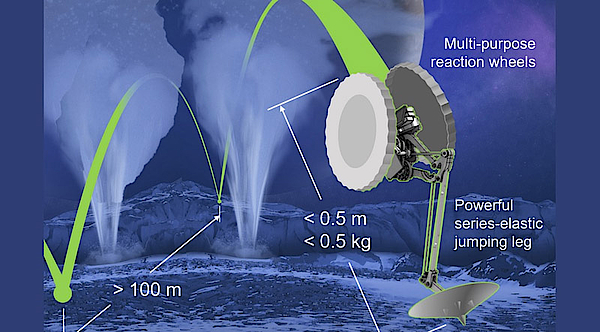
- Концепция робота LEAP (Legged Exploration Across the Plume) в представлении художника.
Как и его прародитель, LEAP будет одноногим. Высота корпуса робота будет около 50 сантиметров, а масса — 0,5 килограмма. Нога с пружинным механизмом будет накапливать и высвобождать энергию, позволяя роботу преодолевать более 100 метров за один прыжок в условиях слабой гравитации. Для сохранения стабильности во время отталкивания и приземления у ноги будет широкая стопа, адаптированная под ледяную поверхность. За управление ориентацией робота в прыжке будут отвечать два маховика, расположенные по бокам корпуса. Они же будут выполнять функцию обычных колес при движении по поверхности, а в случае опрокидывания робот будет использовать их, чтобы вернуться в рабочее положение.
Сейчас инженеры работают над ключевыми технологиями: тестируют устойчивость прыжков на скользкой ледяной поверхности, отрабатывают управление с помощью боковых колес и решают проблему защиты электроники от экстремально низких температур. Недавно проект получил финансирование в рамках программы NASA Innovative Advanced Concepts. Если разработка пойдет успешно, то робот может стать частью миссии Enceladus Orbilander, которая планируется на 2030-е годы.
Межпланетной станции понадобится около 12 лет, чтобы добраться до Сатурна и выйти на орбиту Энцелада, после чего она проведет еще 1,5 года, исследуя спутник с орбиты. Только после этого аппарат совершит посадку на поверхность. Прыгающий робот мог бы значительно расширить возможности миссии. Пока стационарный основной спускаемый модуль будет оставаться на месте, LEAP отправится изучать отдаленные районы, перемещаясь между активными гейзерами и прыгая прямо через их выбросы, чтобы собрать образцы. Это позволило бы получить наиболее полные данные о составе подповерхностного океана и его возможной обитаемости.
В будущем именно прыжки могут стать одним из главных способов исследования ледяных миров Солнечной системы. Инженеры из Швейцарской высшей технической школы Цюриха тоже работают над концептом прыгающего робота, который сможет исследовать поверхность небесных тел в условиях низкой гравитации. Робот SpaceHopper имеет три ноги, которые он использует и для прыжков, и для ориентации корпуса в пространстве.
Комментарии
Комментарии
Апоцентр
(от греч. apo - без или вдали и ..центр) Самая отдаленная от центрального тела точка эллиптической орбиты вокруг него. Апоцентр - наиболее общее ее название... [далее]
Сайт разработан и поддерживается лабораторией 801 Института космических исследований Российской академии наук.
Подбор материалов - Н.Санько
Полное или частичное использование размещённых на сайте материалов
возможно только с обязательной ссылкой на сайт Секция Солнечная система Совета РАН по космосу.