Главная | О сайте | Задачи | Проекты | Результаты | Диверсификация | Новости | Вопросы | История | Информация | Ссылки
Среда, 29.07.2026
Космическая погода на текущий час
Космическая погода на текущий час
Вход в систему не произведен
Войти / Регистрация
Войти / Регистрация
Секция Совета РАН по космосу
< HD 285507 b: очень теплый гигант в Гиадах
Марсоход Curiosity достиг второй промежуточной остановки на пути к горе Шарпа
Достигнув слоистых отложений, получивших название Cooperstown, ровер провел научные исследования и получил обновление своего программного обеспечения (уже третье после посадки на Марс).
Владислава Ананьева
Последние четыре недели марсоход Curiosity провел в дороге, двигаясь по направлению к горе Шарпа. Наконец, он достиг второй промежуточной точки на своем пути, названной обнажением Куперстаун (Cooperstown). Здесь он проведет ряд научных исследований и получит обновление программного обеспечения, а потом двинется дальше.
Операторы миссии провели серьезную работу, добиваясь того, чтобы ровер двигался точно по графику. Однако сейчас с приближением зимы дни становятся короче, ночи – холоднее, и требуется больше энергии, чтобы поддерживать рабочий тепловой режим как служебных подсистем ровера, так и научных приборов.
Тем не менее, между 417 солом (8 октября) и 440 солом (1 ноября) Curiosity совершил 13 переходов, покрыв в общей сложности 760 метров (делая в среднем 58.3 метров за один переход). Несколько переходов ровер проехал в автономном режиме, самостоятельно выбирая наиболее безопасный маршрут. Автономный режим позволяет Curiosity двигаться по местности, которую не могли видеть операторы миссии (что часто бывает во время движения по холмистой местности). В этом случае марсоход самостоятельно объезжает опасные места или останавливается, если не может отыскать безопасный маршрут, и ждет команд с Земли.
В промежутках между переходами Curiosity проводил научные исследования. Прежде всего, он ежедневно делал снимки навигационной камерой NavCams и камерой на мачте Mast Cameras, чтобы показать ученым как окружающий ровер ландшафт, так и более удаленные области. Кроме того, он собирал метеорологические данные с помощью инструмента REMS и изучал радиационную обстановку с помощью радиационного датчика RAD. Во время движения на ровере работал российский прибор DAN, измеряющий содержание воды в верхних слоях почвы под марсоходом. Иногда применялся лазерный спектроскоп ChemCam для определения химического состава окружающих пород и пыли.

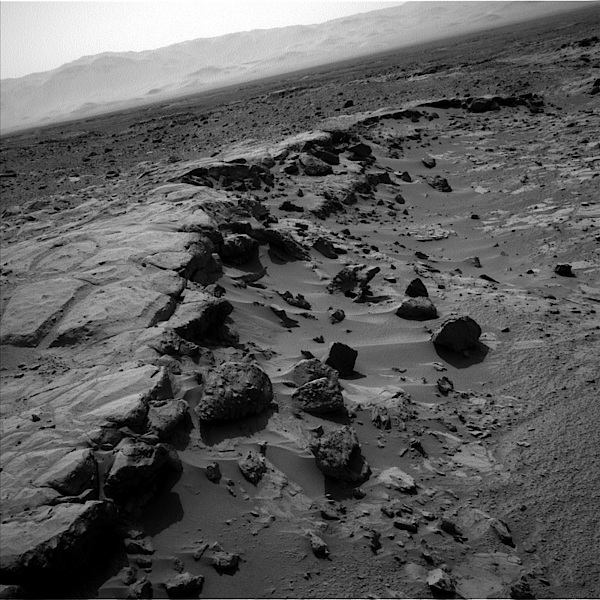
- Обнажение Cooperstown. Здесь и далее фото NASA/JPL/Caltech.
Достигнув Куперстауна, Curiosity начал с детальной съемки окрестностей, используя камеры NavCams и Mast Cameras. Это заняло весь 441 сол (кроме того, ровер несколько раз использовал лазерный спектроскоп ChemCam). На следующий 442 сол марсоход развернул свою роботизированную «руку». Помещая головку «руки» в различные положения, ровер получил несколько высококачественных снимков с близкого расстояния окружающих камней и пыли. Чтобы изучить химический состав камней, использовался спектрометр альфа-частиц и рентгеновских лучей APXS, данные с которого дополнили данные, полученные лазерным спектроскопом.
Текущая неделя посвящена обновлению программного обеспечения Curiosity. Новое ПО улучшит возможности роботизированной «руки» и позволит сохранять больше данных для проведения многодневных научных программ.
К настоящему моменту ровер проехал 4.1 км с момента своей посадки на Марс.
Источник: http://www.spaceflight101.com/msl-mission-updates-6.html
Комментарии
Комментарии
Фуллерены
(название дано в честь американского архитектора Р. Б. Фуллера 1895-1983, предложившего строить ажурные куполообразные конструкции сочетанием пяти - и шестиугольников) Фуллереном называется третья, недавно открытая, аллотропная форма углерода... [далее]
Сайт разработан и поддерживается лабораторией 801 Института космических исследований Российской академии наук.
Подбор материалов - Н.Санько
Полное или частичное использование размещённых на сайте материалов
возможно только с обязательной ссылкой на сайт Секция Солнечная система Совета РАН по космосу.